
***توصیه میکنیم برای یادگیری بهتر و کامل تر به نسخه به روز شده و کامل این مقاله از طریق این لینک مراجعه کنید***
در این مقاله قصد داریم که با هم مقدمات و کلیاتی رو در مورد آموزش برنامه نویسی درایو و راه اندازی موتور براشلس (BLDC) به صورت سنسوردار(اثر هال) رو با هم یاد بگیریم.
همونطور که میدونید موتورهای براشلس که موتورهایی از نوع سه فاز مغناطیس دائم هستند نسل جدیدی از موتورها هستند که جایگزین خوبی برای موتورهای DC جاروبک دار (brush) محسوب میشوند . در ساختار این نوع موتورها بدلیل حذف جاروبک به نوعی هزینه تعمیرات و نگهداری این نوع موتورها خیلی پایین تره ، در عوض راه اندازیشون پیچیده تره !!!
اگر بخواهیم راه اندازی این موتورها رو دسته بندی کنیم میشه اون ها رو به دو صورت کلی سنسوردار و بدون سنسور راه اندازی کرد که هر کدوم از این دو مدل باز خودش شامل چند الگوریتم راه اندازی میشه از جمله :
six step (trapezoidal)
FOC (field oriented control)
sinusoidal
,...
از نظر مکانیکی هم میشه این موتورها رو به دو دسته in-runner (روتور میچرخه )و out-runner (استاتور میچرخه) دسته بندی کرد.
در این آموزش ما قصد داریم تا روش راه اندازی موتورهای براشلس با سنسور اثر هال رو به روش ذوزنقه ای (six step) باهم دیگه یاد بگیریم.
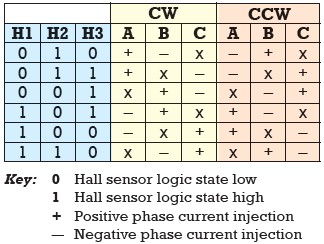
به طور خلاصه در موتورهای براشلس سنسور دار (sensor base bldc) سه تا سنسور اثر هال (عمدتا از نوع لچ) با اختلاف 120 درجه مکانیکی در استاتور در محل تماس با مگنت های روتور قرار می گیرند. بلافاصله بعداز تحریک فازها بسته به اینکه کدوم میدان مغناطیسی ایجاد شده در استاتور که میتونه N یا S باشه از روبه روی کدوم سنسور عبور کنه، خروجی سنسور می تونه یک(High) یا صفر(Low) بشه. وقتی میدان مغناطیسی south از سنسور عبور میکنه، خروجی اون صفره و وقتی میدان مغناطیسی north ازش عبور می کنه، خروجی سنسور یک میشه. حالا با توجه به اینکه سه تا سنسور اثرهال خروجیشون صفره یا یک ، ما 6 حالت قابل قبول برای مجموع خروجی سنسورها داریم که در شکل نشون داده شده (در صورتی که همگی سنسورها سالم باشند حالت خروجی سنسورها نباید 000 یا 111 باشد)
همونطور که میدونید برای تشخیص صفر یا یک بودن سنسورها یا خاموش و روشن کردن سوئیچ های قدرت و کنترل دور موتور و ... ما نیاز به یک پردازنده داریم.
کنترلرهای الکترونیکی، به طور خاص میکروکنترلرها، نقش بسیار مهمی رو دراجرای عملیات های فوق ایفا میکنند. سیگنال های سنسورهای اثر هال به عنوان اینتراپت های خارجی به میکروکنترلر وارد میشن. با تغییر وضعیت هر سنسور از صفر به یک یا بلعکس که منجر به تولید یک سیگنال وقفه خارجی میشه، میکرو تغییرات step(state) رو اعمال میکنه. به عبارتی، میکرو با هر دریافت اینتراپت مطابق جدول بالا وضعیت سوئیچ هارو تغییر میده .
در شکل زیر شما میتونید مجموعه ی موتور درایو که شامل میکروکنترلر، موتور با سنسورهای اثرهال و سوئیچ های قدرت هست رو مشاهده کنید :
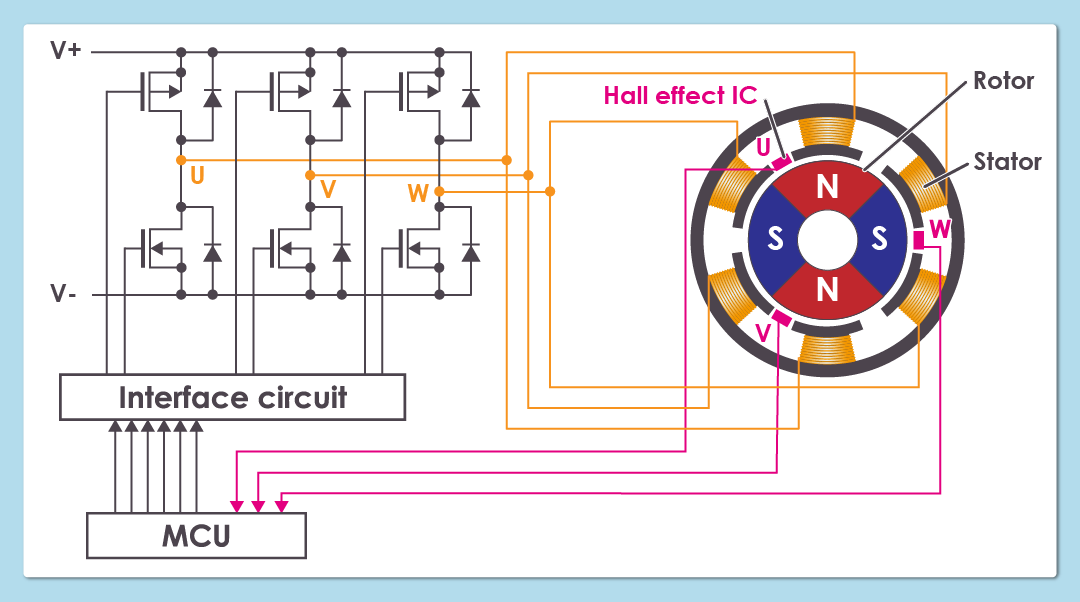
چون این موتوها از نوع سه فاز هستند ما برای راه اندازیشون نیاز به سه تا ساق داریم که هر ساق خودش از دو سوئیچ تشکیل شده که به سوئیچ بالا به اصطلاح high-side و به سوئیچ پایین low-side گفته میشه.
نکته ای که حائز اهمیته اینه که در هر استپ اعمالی به سوئیچ ها طبق جدول بالا هیچگاه نباید دو سوئیچ یک ساق با هم روشن باشند که اگر این اتفاق بیفته باعث سوختن سوئیچ ها میشه !!! به عبارت دیگه در هر لحظه فقط باید یک hi-side و یک low-side از دو ساق مختلف روشن باشن.
6 حالت مورد قبول برای تحریک سوئیچ ها طبق جدول در شکل زیر نشون داده شده :
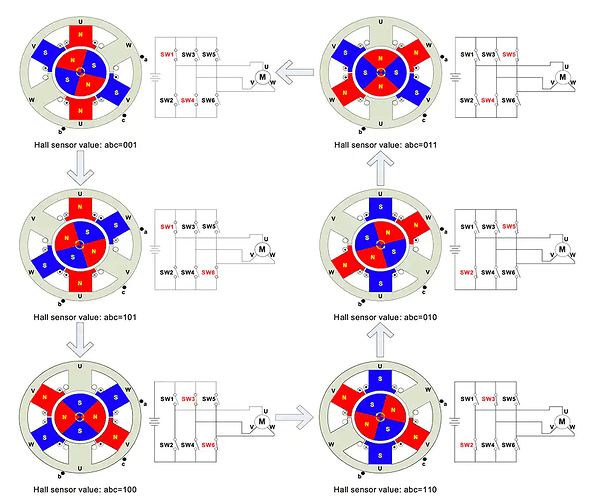
میکرو، وظیفه اش رو با اجرای کد مبتنی بر اینتراپت و تغییر حالت سیگنال های خروجی که بعدا از طریق گیت درایو به سوئیچ های قدرت اعمال میشه، انجام میده. به عبارتی میکروکنترلر 3 تا پین ورودی برای سیگنال های سنسور اثرهال و 6 تا پین خروجی برای 6 تا سوئیچ قدرت داره. با ترکیب موارد فوق ما قادر خواهیم بود، با اعمال توالی مناسب کموتاسیون (تغییر وضعیت سوئیچ ها)، خیلی راحت برنامه نویسی درایور یک موتور براشلس (BLDC) رو به سرانجام برسونیم.
تو این جلسه سعی کردیم آموزش برنامه نویسی درایو و راه اندازی موتور براشلس را به صورت کلی با هم مرور کنیم چرا که بیان تمام جزئیات نیاز به صرف زمان زیادی داره ولی موارد کلی و پیش نیازهای مربوط به پیاده سازی کد نرم افزاری برای درایو موتورهای براشلس سنسوردار رو تا حدودی با هم آموزش دیدیم.
تیم اصفهان درایو با تکیه بر یک دهه تجربه، مطالعه و بررسی منابع گوناگون بهینه ترین روش های ممکن برای درایو و کنترل یک موتور براشلس رو پیاده سازی کرده و درایورهای زیادی رو با متدهای مختلف کنترلی تاکنون طراحی کرده که به صورت صنعتی در حال استفاده هستند.
شما میتونید با تهیه برد آموزشی درایور موتور براشلس سنسوردار و سنسورلس تیم اصفهان درایو که شامل مستندات نرم افزاری و سخت افزاری و سورس کدهای مربوطه هست دانش خودتون رو در این زمینه افزایش بدید و به سادگی خودتون یک طراح درایور موتور براشلس بشید!
خرید برد آموزشی درایور موتور براشلس سنسوردار و سنسورلس
امیدواریم از این مقاله استفاده برده باشید!
با سایر آموزش های اصفهان درایو همراه باشید!









